
云台参数
参数
CD15A
CD20A
云台承重
15Kg
25Kg
云台安装方式
100mm球碗
100mm球碗
俯仰角度
85°(向下), 70°(向上)
90°(向下), 65°(向上)
阻尼调节
6 档
8 档
动平衡调节
8档
8 + 2档 (注)
手柄
双普通手柄
双伸缩手柄
云台自重
4 Kg
5.5 Kg
毛重
12.5 Kg
17.5 Kg
包装箱(长X宽X厚)
58 X 42 X 23 cm
58 X 46 X 28 cm

- ● 角度传感器分辨率率0.0005°
- ● 佳能、富士广播级全伺服镜头数据读取功能
- ● 镜头传感器精度0.01°
- ● 镜头传感器数据反向功能
- ● 云台水平0°角设置功能
- ● 三个坐标轴方向可任意定义
- ● GENLOCK同步功能
- ● 50Hz、60Hz自动发送数据功能
- ● 摄像机ID设置功能
- ● 上传数据格式为FreeD协议
- ● 数据输出接口为网口UDP模式
- ● 系统参数和定位参数保存功能,再次开机时调用上次的参数,无需再次设定
- ● FOV视场角测量及视场角顶点偏移量测量功能
- ● 兼容竖屏拍摄
- ● 数字水平仪,精度0.01°

CD15A/20A云台不仅给出了摄像机水平、俯仰轴角度数据和镜头数据,还包括了摄像机的位置数据,并且这个位置数据是镜头FOV角顶点(眼点)的位置。

云台系统可以采集CANON和FUJINON全伺服镜头的数据。对于半伺服镜头和电影机镜头,系统配备了外接传感器。传感器有适用于15mm和19mm支撑管的支架和直接安装在镜头上的支架。为适应不同的镜头,传感器配有不同模数的齿轮。

云台系统给出的位置数据包括了云台高度“CameraHigh”,FOV角顶点到云台水平轴的距离“FOV Offset”,摄像机侧向偏离云台中心的距离“Side Line”。当摄像机安装在云台上有微小角度偏差时,“PANo”、“TILTo”、“ROLLo”参数可以进行补偿。当需要竖屏拍摄时,额外增加的L形安装板可能使摄像机发生侧向偏移,调节“Side Line”并将“ROLLo”设置为90°即可满足需要。
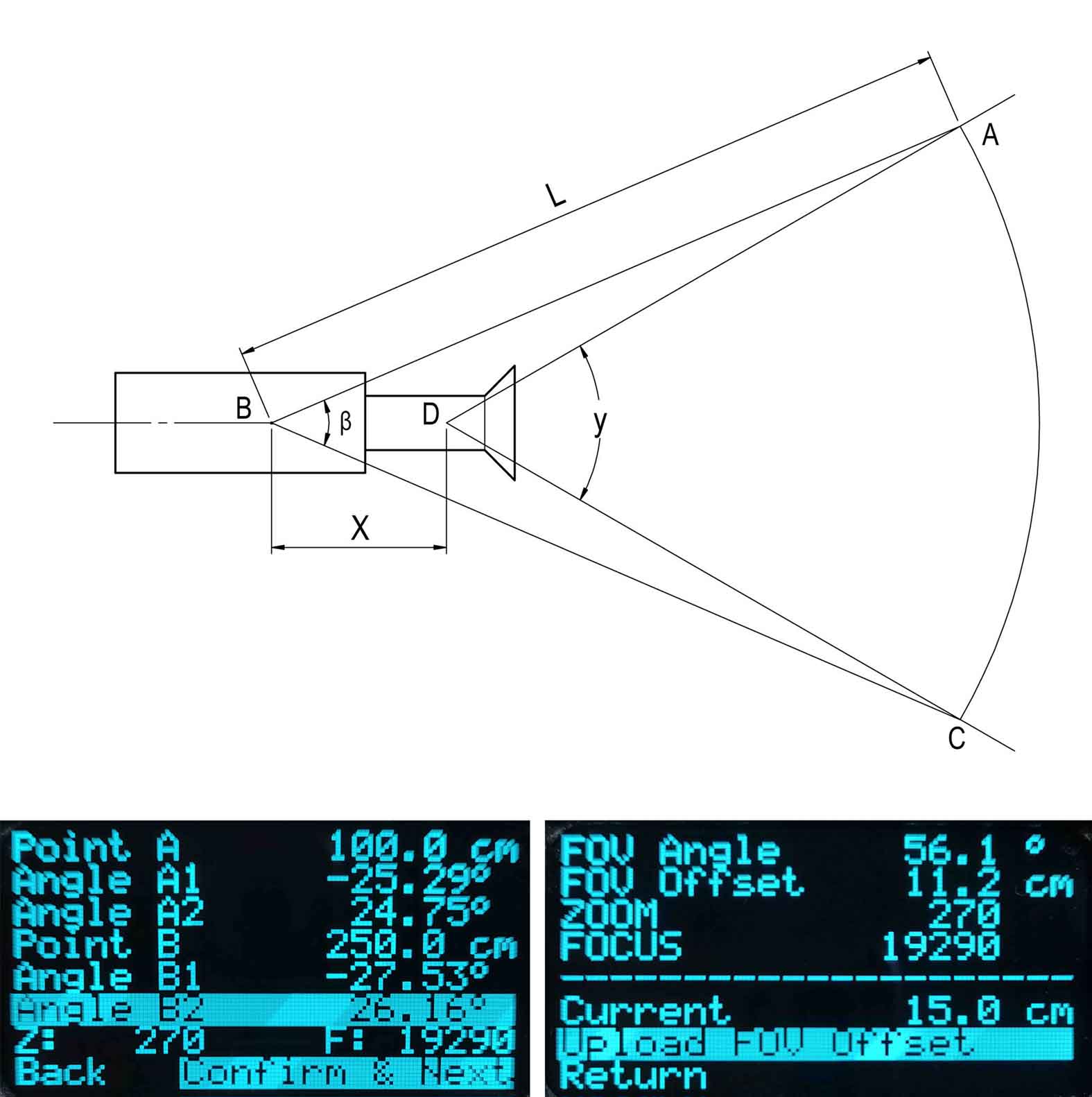
云台系统有FOV角测量功能,仅借助一个卷尺或测距仪就能精确测量镜头的FOV角的角度值及其顶点到云台水平轴的距离。这不仅极大地方便了镜头文件的制作,由于在变焦时,FOV角顶点沿光轴有大范围的移动,这一功能为精确的虚拟跟踪提供了重要的基础数据。

云台内置高精度数字水平仪,精度0.01°,可比肩市场在售的高档数字水平仪。