
臂身长度
6.3m
最大高度
4.85m
承重
25Kg
俯仰角度
±50°
角度精度
360°/1048576
典型架设时间
30分钟
典型位置参数设置时间
10分钟
定位精度
<2.5cm
数据输出
FreeD协议,串口RS422模式和网口UDP模式
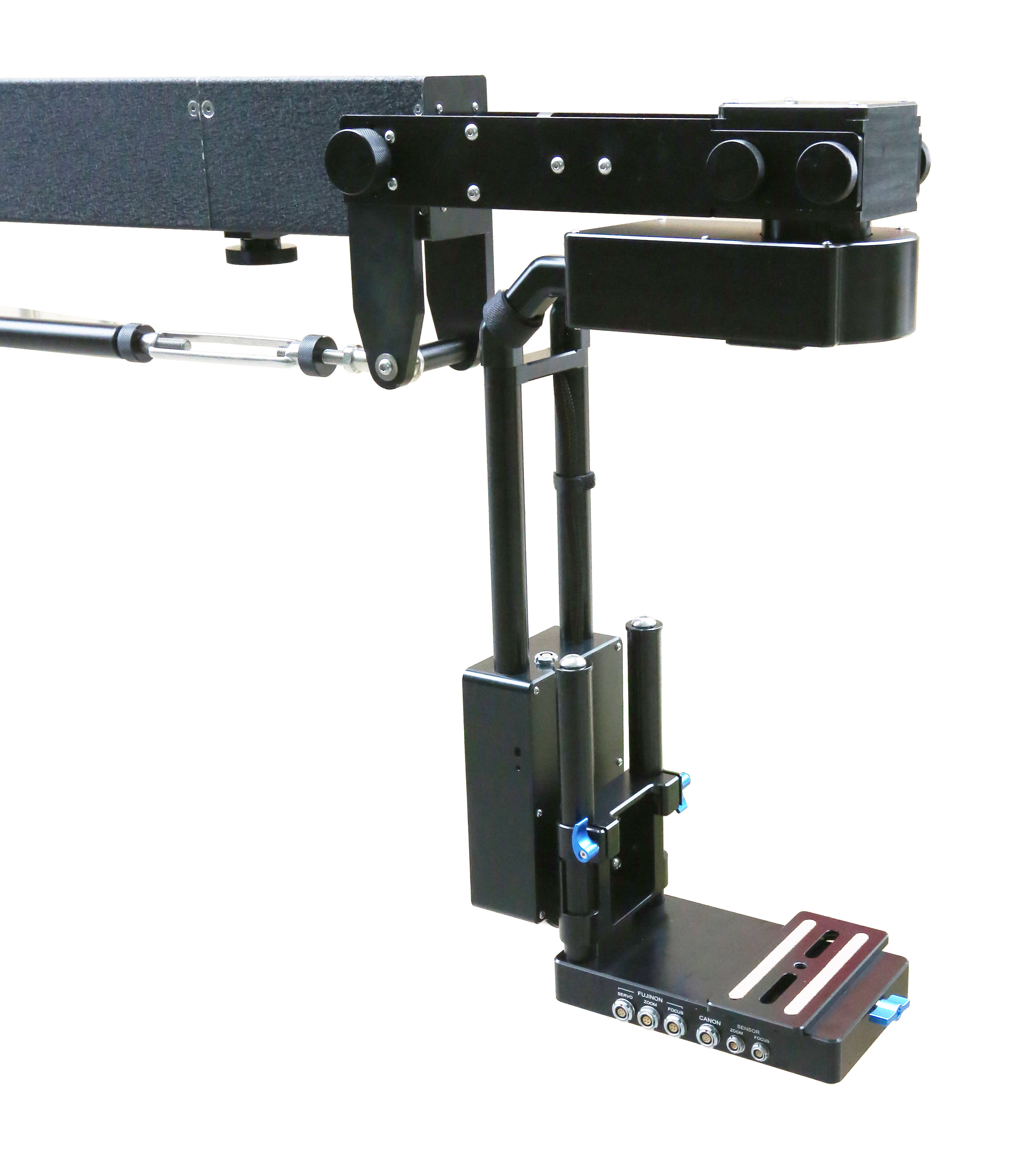
TJ10虚拟跟踪摇臂是为虚拟拍摄需求专门设计制造的电控云台摇臂。摇臂系统在臂身的水平俯仰轴和电控云台的水平俯仰轴上均加装了工业级高精度角度传感器。云台的驱动采样了高质量的直流伺服电机,结构上采用了冗余设计,使摇臂在摇动过程中更加稳定。电控云台上配备了镜头控制和数据采集系统,可以对广播级的全伺服和半伺服镜头进行控制和数据采集。特别地,摇臂上使用了与光学测量仪器同类型的高精度水平仪,从而保证了在整个摇臂的移动范围内都能给出精确的跟踪数据。TJ10虚拟跟踪摇臂除了应用在虚拟抠像拍摄场景外,还特别适用于AR(增强现实)和XR(LED屏)这样的对跟踪数据精度有很高要求的应用场合。

TJ10虚拟跟踪摇臂在架设和虚拟跟踪数据的初始参数设置方面采用了非常人性化的设计。为保证用户在短时间内高效地进行高精度架设,每个三脚架腿都设计了丝杠调节装置。为方便快捷地进行初始的虚拟参数设置,系统采用了软件硬件相结合的方式,提供了在虚拟场景中实时进行参数调节的功能,实现了所见即所得的效果。